Ausgangslage:
Der Kunststoffspritzguss ist ein bedeutendes Verfahren zur kostengünstigen Herstellung von Kunststoffteilen in großen Stückzahlen. Eine Eigenheit dieses Verfahrens ist, dass die gefertigten Bauteile einen unvermeidbaren Grat aufweisen. Grate sind scharfe Kanten oder Auffaserungen, die während des Prozesses entstehen. Ein wichtiger Arbeitsschritt ist also das Entfernen des Grates, welcher in der Regel manuell mit einem Entgratwerkzeug erfolgt. Manuelle Arbeitsschritte sind meist kostenintensiv und führen zu einer Erhöhung der Produktionskosten.
Ziele:
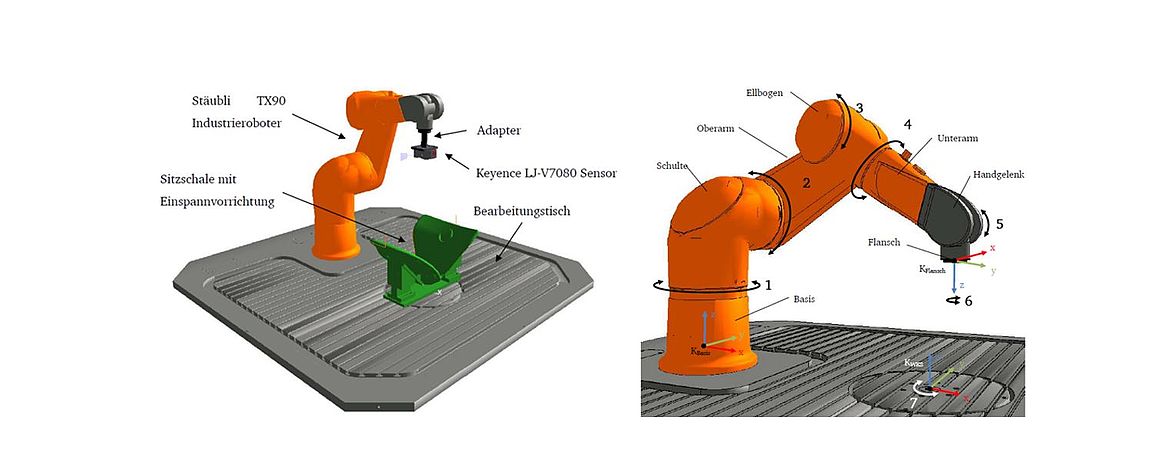
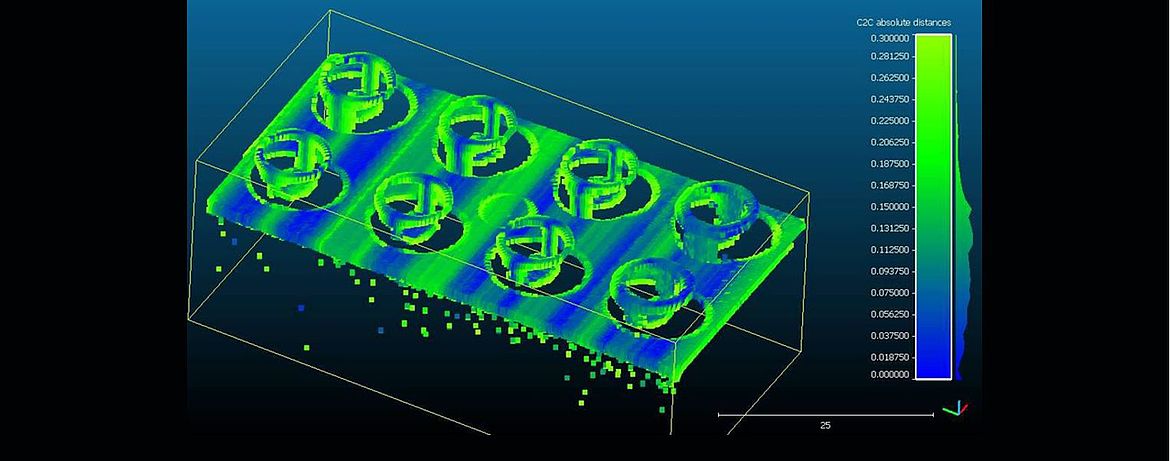
Das Ziel des Forschungsprojekts SAUBER3D ist demnach die Entwicklung einer vollautomatischen Lösung zur Entgratung von Spritzgussteilen aus Kunststoff. Durch das zu entwickelnde System wird eine erhebliche Steigerung der Geschwindigkeit und Präzision bei der Entgratung erwartet, wodurch die Produktionskosten verringert und die Wettbewerbsfähigkeit erhöht werden können. Das angedachte Gesamtsystem besteht aus einem industriellen Roboterarm und einem Endeffektor, an dem ein 2D-Laserprofiler und ein Entgratwerkzeug angebracht sind. Mit Hilfe der Informationen aus dem CAD-Modell des zu bearbeitenden Werkstücks soll eine initiale Bahn entlang der Gratkanten erstellt werden, welche zur Akquirierung von Laserscans abgefahren wird. Darauf basierend soll eine Fusionierung der Scans zu einer Punktewolke, die Detektion des zu entfernenden Grats und die Berechnung der finalen Bahn mit korrektem Anstellwinkel für das Entgratwerkzeug erfolgen. Anschließend findet die Entfernung des Grats statt. Das System soll so modular entwickelt werden, dass die generelle Einsatzfähigkeit nicht auf eine Art von Werkstück beschränkt ist. Mittels eines Prototyps soll die Erprobung des Systems vollzogen werden.
Ablauf:
Zu Beginn werden die Anforderungen, der Funktionsumfang und Anwendungsszenarien definiert. Anschließend werden die Sensorik und die notwendige Peripherie ausgewählt, integriert und geprüft. Es erfolgt eine genaue Betrachtung der Zeitsynchronisation von den Sensoren und dem Roboter mit dem Ziel alle Messgrößen in einem Referenzzeitsystem zu vereinigen. Ein weiterer wichtiger Punkt ist die Entwicklung einer automatischen Werkzeug-Roboter-Kalibrierung unter Berücksichtigung der spezifizierten Genauigkeiten. Die Programmierung des Roboterpfades mit dem Ziel, ein vollautomatisches Abfahren der initialen Trajektorie durch den Roboter zu ermöglichen, findet schon früh im Projekt Beachtung. Die erfassten Sensordaten gilt es geeignet zu verarbeiten und zu analysieren, um den Grat zu detektieren und die Trajektorie zu korrigieren. Die Performance und die Funktionsweise des Systems werden regelmäßig mit Hilfe von Tests überprüft und evaluiert werden.